电路如图所示:
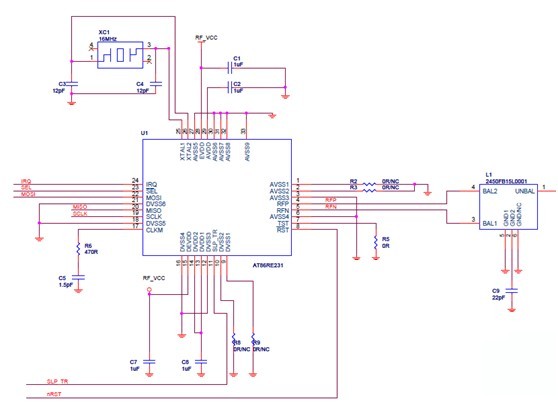
其中控制芯片使用SAM3S4B,通过SPI格式(单一的SAM3S4B为主端,AT86RE231为从端)与AT86RF231进行通讯,AT86RF231是一款工业级,低电压供电,超低功耗,方便操作,遵循IEEE802.15.4-2006 硬件标准。AT86RF231将控制信号转换为zigbee模式的差分对信号,通过2.45Ghz的谐波滤波器2450FB15L0001滤波后接入天线与其余zigbee端点进行通讯,2450FB15L0001主要是对接受到得zigbee信号进行滤波。
Zigbee框架下编译程序,需要进行些简单的设置,
因为处与zigbee协议栈框架中,部分源码被atmel,封装起来,在man函数中,SYS_sysinit();系统初始化给出.h文件,而没有具体的C代码。这意味ZIGBEE的具体结构核心部分不是开源的。实际中SYS_sysinit()在libBc_All_At91sam3s4c_Rf231_Iar.a中,该文件被封装起来。
其中,对bitcloud编译生成的是libHAL_Sam3sEkRf2xx_At91sam3s4c_64Mhz_Iar.a。
这里面即便被封住,我们可以进入bitcloud源码内,解读代码,如WTD操作,HAL_InstallInterruptVector(),TimeTick_Configure()还是可以进行代码解读的。那对zigbee格式下的函数应该怎样跟踪解析代码:例如pio.h中,PIO_Configure();无法看到C代码的实现过程。可以鼠标右击pio.h文件(见下图1),open containing folder,打开文件夹,找到include中的pio.h文件,可以推测出点C文件如果有,应该存在于source中。进行代码解读。
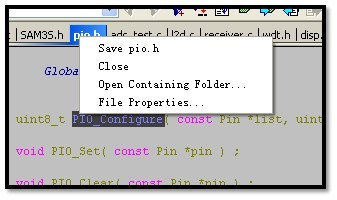
图1
在下面历程中,给出协调器和节点的实现。
协调器部分程序:
int main(void)
{
//初始化,相关系统配置
SYS_SysInit();
..
..
for(;;)
{
//数据处理
..
..
SYS_RunTask();
}
}
SYS_SysInit();函数是系统的函数,用来初始化系统的硬件;
SYS_RunTask();是调用zigbee的入口函数,会调用BitCloud协议栈中的用户应用程序,即APL_TaskHandler();
voidAPL_TaskHandler(void)
{
switch (appState)
{
case APP_INITIAL_STATE:
initHardware();
initNetwork();
break;
case APP_JOINING_STATE:
startNetwork();
break;
case APP_JOINED_STATE:
break;
default:
break;
}
}
APL_TaskHandler();这个函数类似个有限状态机,是zigbee所处状态的处理,程序在初始化时static AppState_tappState = APP_INITIAL_STATE;
如果没有添加入网络,或者从网络中断掉,在主程序每次循环的时候,会添加入网络,如果是已将处于zigbee网络中,则处于APP_JOINED_STATE状态,直接退出APL_TaskHandler()函数。
我们可以看下具体状态下的子函数;
硬件初始化只是配置个LED,当zigbee网络正常工作时,led1常亮状态,否认闪亮。
static void initHardware(void)
{
LED_Configure(APP_LED_0);
LED_Configure(APP_LED_1);
}
而对协调器的配置是zigbee配置的关键部分,下面一段代码将本身配置为协调器,并在网络中定义两个节点。
static void initNetwork(void)
{
DeviceType_tdeviceType = DEVICE_TYPE_COORDINATOR; //配置成协调器
CS_WriteParameter(CS_DEVICE_TYPE_ID, &deviceType);
boolpredefPANID = true;
uint16_tnwkPANID = 0x1000;
CS_WriteParameter(CS_NWK_PREDEFINED_PANID_ID, &predefPANID);
CS_WriteParameter(CS_NWK_PANID_ID, &nwkPANID);//add by jacky
// 定义数据节点0
apsDataReq.dstAddrMode = APS_SHORT_ADDRESS;
apsDataReq.dstAddress.shortAddress = 0;
apsDataReq.profileId = APP_PROFILE_ID;
apsDataReq.dstEndpoint = APP_DATA_ENDPOINT;//0X20
apsDataReq.clusterId = APP_CLUSTER_ID;
apsDataReq.srcEndpoint = APP_DATA_ENDPOINT;//0X20
apsDataReq.asdu = (uint8_t *)sensor_buf;
apsDataReq.asduLength = sizeof(execute_buf);//传输数据
apsDataReq.txOptions.acknowledgedTransmission = 0;
apsDataReq.radius = 0;
apsDataReq.APS_DataConf = apsDataReqConf;
// 定义数据节点1
apsDataReq1.dstAddrMode = APS_SHORT_ADDRESS;
apsDataReq1.dstAddress.shortAddress = 0;
apsDataReq1.profileId = APP_PROFILE_ID;
apsDataReq1.dstEndpoint = 0x40;
apsDataReq1.clusterId = APP_CLUSTER_ID;
apsDataReq1.srcEndpoint = 0x40;
apsDataReq1.asdu = (uint8_t *)execute_buf;
apsDataReq1.asduLength = sizeof(execute_buf);//传输数据
apsDataReq1.txOptions.acknowledgedTransmission = 0;
apsDataReq1.radius = 0;
apsDataReq1.APS_DataConf = apsDataReqConf1;
appState = APP_JOINING_STATE;
SYS_PostTask(APL_TASK_ID);
}
初始化结束后会改变appState的状态,appState = APP_JOINING_STATE; 进行网络的加入操作,使用SYS_PostTask(APL_TASK_ID);来投递任务,让系统再次调用APL_TaskHandler() 去执行case APP_JOINING_STATE进而去执行startNetwork()函数。
startNetwork()创建一个定时器用来控制led的亮灭来表示网络的连接状态,在注册一个网络连接确认的回调函数。
static void startNetwork(void)
{
blinkTimer.interval = BLINK_TIMER_INTERVAL;
blinkTimer.mode = TIMER_REPEAT_MODE;
blinkTimer.callback = blinkTimerFired;
HAL_StartAppTimer(&blinkTimer);
startNetworkReq.ZDO_StartNetworkConf = ZDO_StartNetworkConf;//回调函数
ZDO_StartNetworkReq(&startNetworkReq);
}
回调函数中,主要是判断zigbee网络连接,连接成功,关闭定时器和注册网络节点。
static void ZDO_StartNetworkConf(ZDO_StartNetworkConf_t* conf)
{
HAL_StopAppTimer(&blinkTimer); //add by lht
if (ZDO_SUCCESS_STATUS == conf->status)
{
appState = APP_JOINED_STATE;
// 注册网络节点0
registerDataEndpointReq.simpleDescriptor = &dataEndpoint;
registerDataEndpointReq.APS_DataInd = APS_DataIndData;
APS_RegisterEndpointReq(®isterDataEndpointReq);
// 注册网络节点1
registerDataEndpointReq1.simpleDescriptor = &dataEndpoint1;
registerDataEndpointReq1.APS_DataInd = APS_DataIndData1;
APS_RegisterEndpointReq(®isterDataEndpointReq1);
}
else
{
appState = APP_JOINING_STATE;
}
SYS_PostTask(APL_TASK_ID);
}
zigbee数据发送函数:
static void sendDataBlock(unsigned char channel)
{
switch(channel)
{
case Sensor:
APS_DataReq(&apsDataReq);
break;
case Execute:
APS_DataReq(&apsDataReq1);
break;
default:
break;
}
}
zigbee数据接受函数:
static void APS_DataIndData(APS_DataInd_t *ind) //data come from sensor module
{
zigbee_in_flag = 1;
memcpy(&sensor_data[1],ind->asdu, 18);
sensor_from_address = ind->srcAddress.shortAddress;
}
static void APS_DataIndData1(APS_DataInd_t *ind) //data come from excute module
{
memcpy(init_data,ind->asdu, 30);
to_excute_address = ind->srcAddress.shortAddress;
if(init_data[0] == 0xaa)
{
enable_count = 1;
excute_open = 1;
}
}
在zigbee的节点函数APL_TaskHandler(),与协调器程序中多的状态是:离开zigbee网络,定义的宏是APP_LEAVE_STATE。
voidAPL_TaskHandler(void)
{
switch (appState)
{
case APP_INITIAL_STATE:
&nbnbsp; initHardware();
initNetwork();
break;
case APP_JOINING_STATE:
startNetwork();
break;
case APP_JOINED_STATE:
break;
case APP_LEAVE_STATE:
&nbsnbsp; leaveNetwork();
break;
case APP_LEAVING_STATE:
break;
default:
break;
}
}